- INDEX目次
目次【非表示】
- 1.【動画でわかる】モータのトルクとは?
- 2.モーターのトルクとは?物体を回転させる力の大きさを指す
- 3.モーターのトルクと回転数は基本的に反比例の関係にある
- 3-1.モーターの性能がわかるS-T特性(速度ートルク特性)とは
- 4.モーターのトルクを計算する方法【単位も解説】
- 4-1.トルクを求めるための基本的な計算式
- 4-2.トルクの単位として使われる「N・m(ニュートンメートル)」の意味
- 5.理解しておきたいモーターの代表的なトルク3種類
- 5-1.モーターが回転し始めるときの「起動トルク」
- 5-2.安定した運転で発生する「定格トルク」
- 5-3.モーターが出せる瞬間的な力の限界「最大トルク」
- 6.モーターのトルクを制御する2つの主な方法
- 6-1.電圧の大きさを変えてトルクをコントロールする
- 6-2.電流の量を調整してトルクをコントロールする
- 7.用途に適したトルクのモーターを選ぶ際のポイント
- 7-1.使用する機器に必要なトルクの大きさを把握する
- 7-2.モーターの種類ごとのトルク特性を理解しておく
- 8.まとめ
【動画でわかる】モータのトルクとは?
モーターのトルクとは、物体を回転させる力の大きさを指します。
このトルクと回転数には密接な関係があり、モーターの性能を理解する上で欠かせません。
この記事では、トルクの基本的な意味から回転数との関係、具体的な計算式、さらにはモーター選定のポイントやトルクの制御方法といった使い方まで、幅広く解説します。
基本的な式を理解することで、より適切なモーターの選定が可能になります。
モーターのトルクとは?物体を回転させる力の大きさを指す
モーターにおけるトルクとは、回転軸を中心に物体を回転させようとする力の大きさを示す指標です。
具体的には「力×回転軸からの距離」で表され、この値が大きいほど、より重いものを動かしたり、強い荷重に逆らって回転させたりする能力が高いことを意味します。
モーターが機械を駆動させる際の基本的な性能を表す重要なパラメータの一つです。
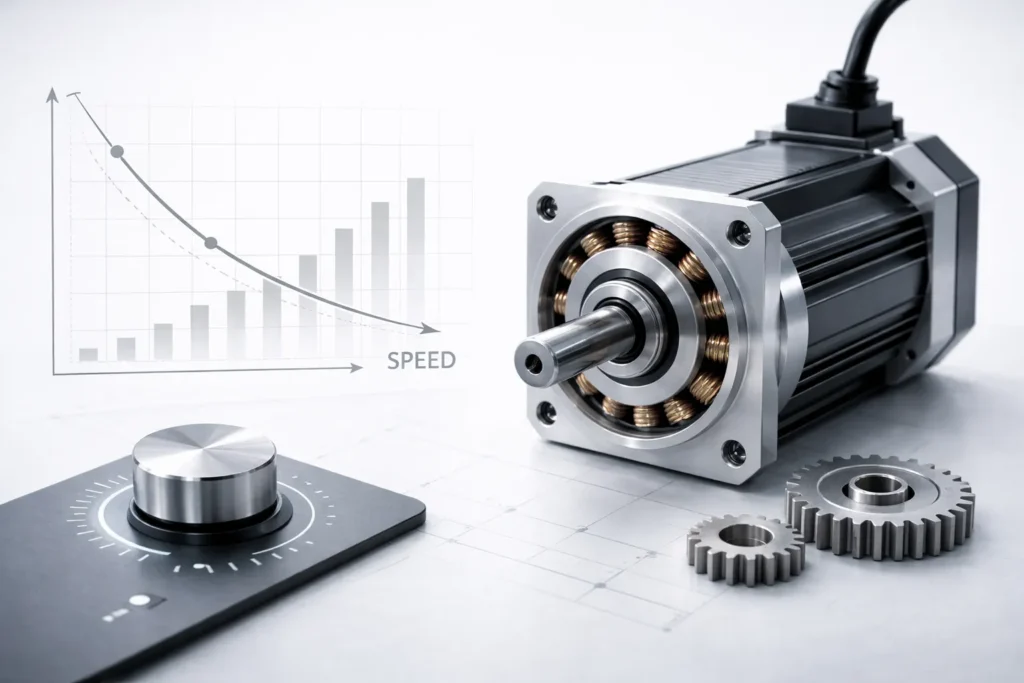
モーターのトルクと回転数は基本的に反比例の関係にある
モーターのトルクと回転数は、一般的に反比例の関係にあります。
つまり、モーターにかかる負荷が大きくなり強いトルクが必要になると回転スピードは低下し、逆に負荷が小さく低いトルクで済む場合は、より高い速度で回転します。
この関係性はモーターの性能を決定づける重要な要素であり、負荷の変動に対してモーターの動きがどう変わるかを示しています。
モーターの性能がわかるS-T特性(速度ートルク特性)とは
モーターの性能を示す指標として、S-T特性(速度-トルク特性)があります。
これは、横軸にトルク、縦軸に回転速度をとったグラフで、両者の関係を視覚的に示した線図です。
このカーブを見ることで、特定のトルクがかかったときにモーターがどのくらいの速度で回転するかがわかります。
例えば、グラフの右下がりは、トルクが大きくなるほど回転速度が遅くなるという特性を表しています。
モーターを選定する際には、このS-T特性を比較し、使用したい領域での性能が要件を満たしているかを確認します。
このグラフの見方を理解することで、複数のモーターの特性を客観的に比較検討できます。
モーターのトルクを計算する方法【単位も解説】
モーターのトルクを理解するには、計算方法を知ることが不可欠です。
トルクの計算には公式があり、モーターの出力や回転数から求められます。
計算結果の単位は、「N・m(ニュートンメートル)」が一般的に使用されます。
ここでは、トルクの計算式と、単位の換算方法やその意味について解説します。
トルクを求めるための基本的な計算式

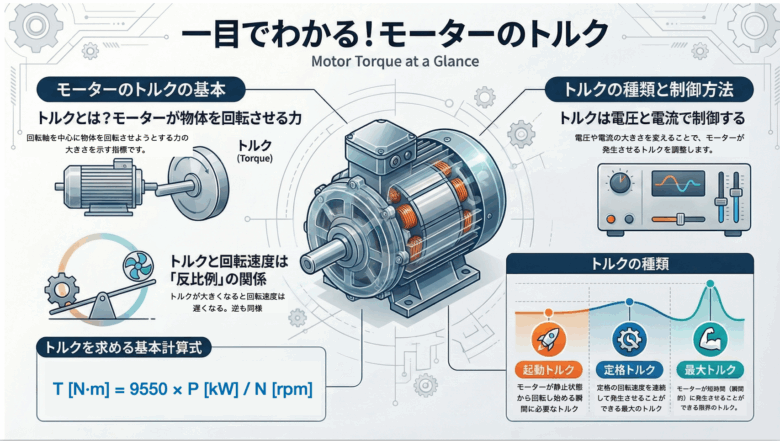
モーターのトルクを求める基本的な計算式は「T=9550×P/N」で表されます。
ここで、Tはトルク(N・m)、Pはモーターの出力(kW)、Nは回転数(rpm)です。
この式により、モーターの出力と回転数がわかれば、理論上のトルクを算出できます。しかし、実際に機器を動かす際に必要な負荷トルクを計算する場合は、この基本式に加え、機械的な摩擦による抵抗や、ギアによる減速比なども考慮に入れる必要があります。特に、減速機を使用すると、トルクは減速比に比例して大きくなるため、装置全体の設計において重要な要素となります。
トルクの単位として使われる「N・m(ニュートンメートル)」の意味
トルクの単位として広く用いられる「N・m(ニュートンメートル)」は、力の大きさとその力が作用する点までの距離を組み合わせたものです。
具体的には、「回転軸から1メートルの距離の点に、1ニュートン(N)の力を加えたときの回転力」を意味します。
1Nは約102グラムの物体にかかる重力に相当するため、1N・mは回転軸から1m離れた点に約102gの重りをぶら下げた際の回転力、と考えると目安になります。
この単位は国際単位系(SI)におけるトルクの標準単位ですが、計算の際には定数や他の単位との関係を正確に理解しておくことが求められます。
理解しておきたいモーターの代表的なトルク3種類
モーターの仕様書や性能曲線には、複数のトルクが記載されています。
中でも特に重要なのが「起動トルク」「定格トルク」「最大トルク」の3種類です。
これらはモーターの動作の異なる局面における性能を示しており、無負荷時や定格運転時、そして限界的な状況での力を表します。
それぞれのトルクの意味を正しく理解することは、モーターを適切に選定し、安定して使用するために不可欠です。
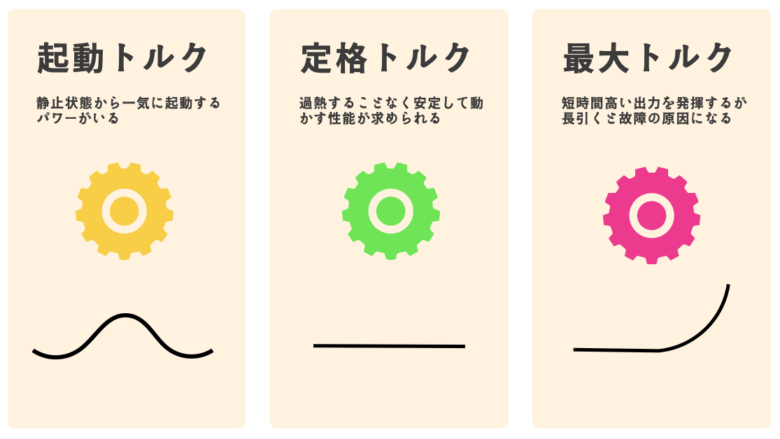
モーターが回転し始めるときの「起動トルク」
起動トルクは、始動トルクとも呼ばれ、モーターが停止した状態から回転を始める瞬間に発生するトルクです。
モーターが動き出すためには、静止摩擦力や連結されている負荷の慣性に打ち勝つ力が必要であり、起動トルクはこの初期の抵抗にかかる力を上回らなければなりません。
特に、重い負荷を静止状態から動かす場合や、コンベアのように大きな静止摩擦がかかる用途では、この起動トルクが十分に大きいモーターを選定することが重要です。
起動トルクが負荷より小さいと、モーターは回転を始めることができません。
安定した運転で発生する「定格トルク」
定格トルクとは、モーターが指定された定格電圧や定格周波数の下で、連続的に安全に運転できる最大のトルクを指します。
この範囲内であれば、モーターは過熱することなく安定した性能を発揮し続けることが可能です。
モーターの仕様書に記載されているトルクは、多くの場合この定格トルクを指しており、モーターの基本的な能力を示す基準値となります。
設計時には、通常運転時にかかる負荷がこの定格トルクの範囲内に収まるように、一定の余裕を持たせてモーターを選定します。
これにより、モーターの寿命を保ち、安定した動作を確保します。
モーターが出せる瞬間的な力の限界「最大トルク」
最大トルクは、失速トルクや脱出トルクとも呼ばれ、モーターが短時間で瞬間的に発生させることができるトルクの限界値です。
このトルクは、定格トルクを上回る大きな力を必要とする場面で一時的に利用されますが、この状態が長く続くとモーターが過熱し、損傷する原因となります。
負荷が最大トルクを超えると、モーターは回転を維持できなくなり停止(失速)してしまいます。
そのため、予期せぬ過負荷がかかる可能性がある用途では、この最大トルクの値も考慮して選定する必要があります。
モーターから期待したトルクが出ない場合、負荷がこの限界を超えている可能性があります。
モーターのトルクを制御する2つの主な方法
モーターのトルクは、用途に応じて精密な制御が求められる場合があります。
例えば、巻き取り機で一定の張力を保ったり、ロボットアームで対象物を適切な力で掴んだりする際には、トルクの調整が不可欠です。
主な制御方法として、モーターに加える電圧を変化させる方法と、流す電流を調整する方法があります。
多くの場合、センサーで現在のトルクや回転数を検知し、目標値に近づけるためのフィードバック制御が行われます。
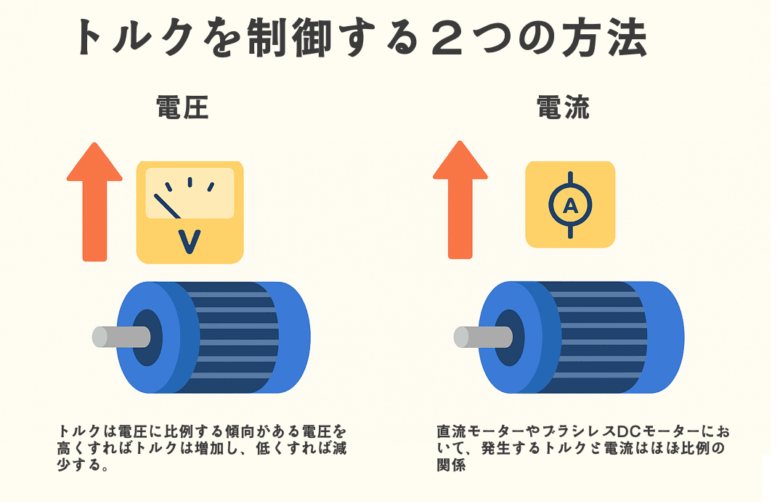
電圧の大きさを変えてトルクをコントロールする
モーターのトルクを制御する一つの方法は、印加する電圧の大きさを変えることです。
特に直流(DC)モーターでは、トルクは電圧に比例する傾向があるため、電圧を高くすればトルクは増加し、低くすれば減少します。
この原理を利用して、電源の電圧を調整することでトルクをコントロールします。
一方、交流(AC)モーターの場合は、電圧だけでなく周波数も回転速度に影響を与えるため、インバーターを用いて電圧と周波数を同時に可変させるVVVF(可変電圧可変周波数)制御が広く用いられます。
例えば、周波数を40Hzに設定するといった調整を行います。
※印加とは、電気回路に電圧や信号を与えることを指します。
電流の量を調整してトルクをコントロールする
トルクを制御するもう一つの主要な方法は、モーターに流す電流の量を調整することです。
多くのモーター、特に直流モーターやブラシレスDCモーターにおいて、発生するトルクと電流はほぼ比例の関係にあります。
このトルクと電流の関係性を利用し、モータードライバICなどを用いて電流値を精密にコントロールすることで、要求されるトルクを正確に発生させることが可能です。
サーボモーターなどの高精度な位置決めが求められるシステムでは、この電流制御が重要な役割を果たします。
現在の電流値を監視し、目標のトルクが得られるようにフィードバックをかけることで、安定したトルク制御が実現します。
用途に適したトルクのモーターを選ぶ際のポイント

モーターを選定する上で、トルクは最も重要な仕様の一つです。
用途に対してトルクが不足していると装置は動作せず、逆に過剰すぎるとコスト増やサイズの問題につながります。
そのため、機械の設計段階で必要なトルクを正確に算出し、それに適したモーターを選ぶことが求められます。
ここでは、実際の用途に合わせたモーターを選定するための具体的なポイントを解説します。
使用する機器に必要なトルクの大きさを把握する
モーターを選定する最初のステップは、駆動させる機器が実際に必要とするトルク(負荷トルク)の大きさを正確に把握することです。
これには、動かす物体の重さや慣性、摩擦抵抗などを考慮した計算が必要です。
算出した負荷トルクに対して、一般的には1.5倍から2倍程度の安全率を見込んだトルクを持つモーターを選びます。
トルクが不足するとモーターが動かないだけでなく、過負荷による発熱や効率の低下を引き起こします。
逆にトルクが大きすぎると、コストが高くなるだけでなく、不要な振動や装置へのダメージ、消費電力の増加につながるため、適切な温度管理も重要になります。
モーターの種類ごとのトルク特性を理解しておく
モーターには様々な種類があり、それぞれトルクの特性が異なります。
例えば、直流(DC)モーターは起動トルクが高く、模型や車のおもちゃなどによく使われます。
ブラシレスDCモーターは、高効率で長寿命な点が特徴です。
交流(AC)モーターは、工場のコンベアなど一定速度での運転に適しています。
精密な位置決めが必要な用途では、ステッピングモーターやサーボモーターが選ばれます。
マブチモーターに代表される小型直流モーターから、産業用の大型モーターまで、用途に応じて特性は多様です。
エアモーターのような特殊なものもあり、それぞれの長所と短所を理解して選定することが重要です。
まとめ
モーターのトルクは物体を回転させる力の大きさを示し、回転数とは基本的に反比例の関係にあります。
モーターを選定・使用する上では、起動トルク、定格トルク、最大トルクといった種類を理解し、S-T特性グラフからその性能を読み解くことが求められます。
トルクの計算式「T=9550×P/N」を用いて必要なトルクを算出し、電圧制御や電流制御によってトルクを調整します。
負荷に対してトルクが過剰な場合は、ギアヘッドなどを用いて回転数を下げると同時にトルクを増大させることも可能です。
これらの知識を活用し、用途に合った適切なモーターを選定することが、装置の安定稼働につながります。

西進商事コラム編集部
西進商事コラム編集部です。専門商社かつメーカーとしての長い歴史を持ち、精密装置やレーザー加工の最前線を発信。分析標準物質の活用も含め、さまざまなコラム発信をします。
AOD(音響光学偏向器)とは?AOMとの違いも解説

CO2レーザーとは?原理・特徴・用途をわかりやすく解説!
FMEAのやり方を7つの手順で解説!初心者向けの作成方法と具体例
OPCサーバとは?仕組みやメリット、選び方を分かりやすく解説

PLCとは?シーケンサとは?わかりやすくどんな装置か基礎知識を徹底解説!
PLCは時代遅れ?ラダー言語の今後と未来の必要性を解説

yag(ヤグ)レーザとは?仕組みや特徴・用途を説明
